MapleSim Ropes and Pulleys Library
MapleSim Ropes and Pulleys LibraryReduce the risk of design issues with accurate, dynamic simulations of winch and pulley systems.
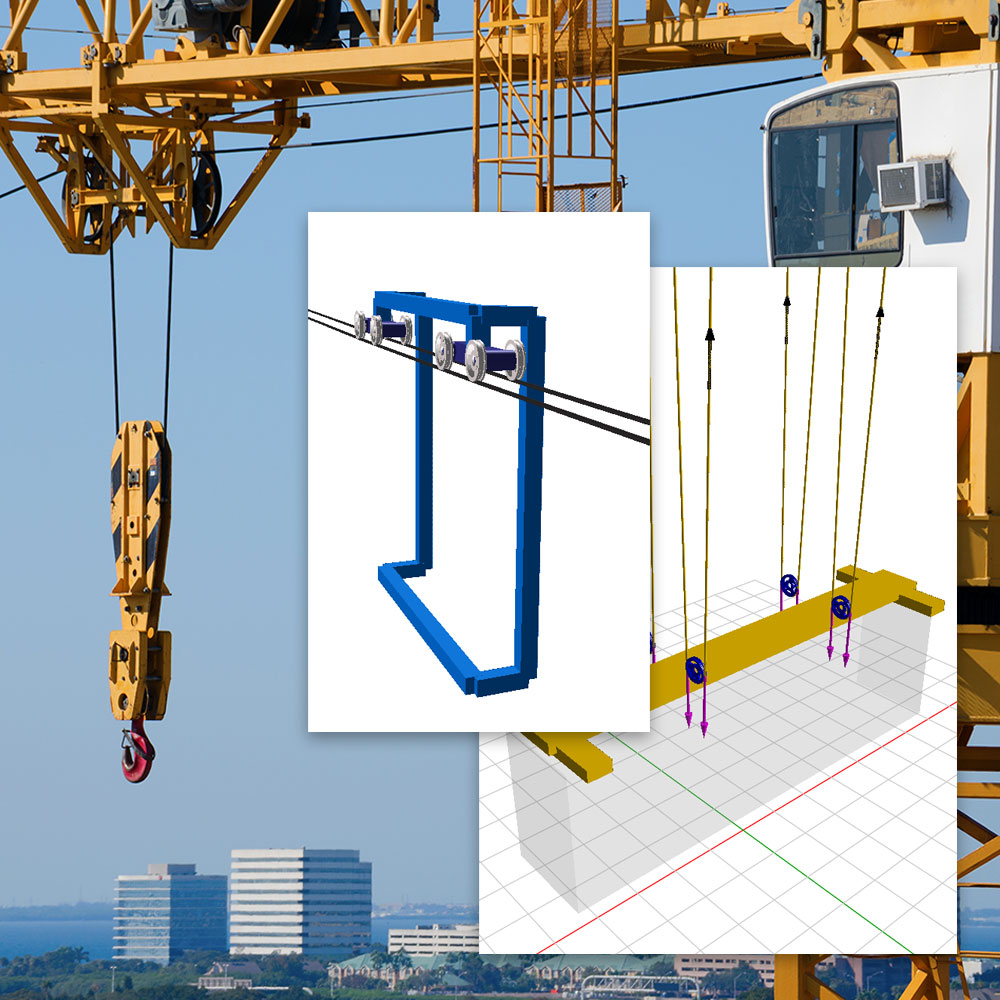
- Ensure the proper functioning of both 2-D and 3-D pulley systems before physical prototypes
- Solve existing issues earlier by simulating pulley slippage, chain masses, cable bending, and more
- Test designs quickly with accurate, 3-D visualizations of pulley systems
Overview of the MapleSim Ropes and Pulleys Library
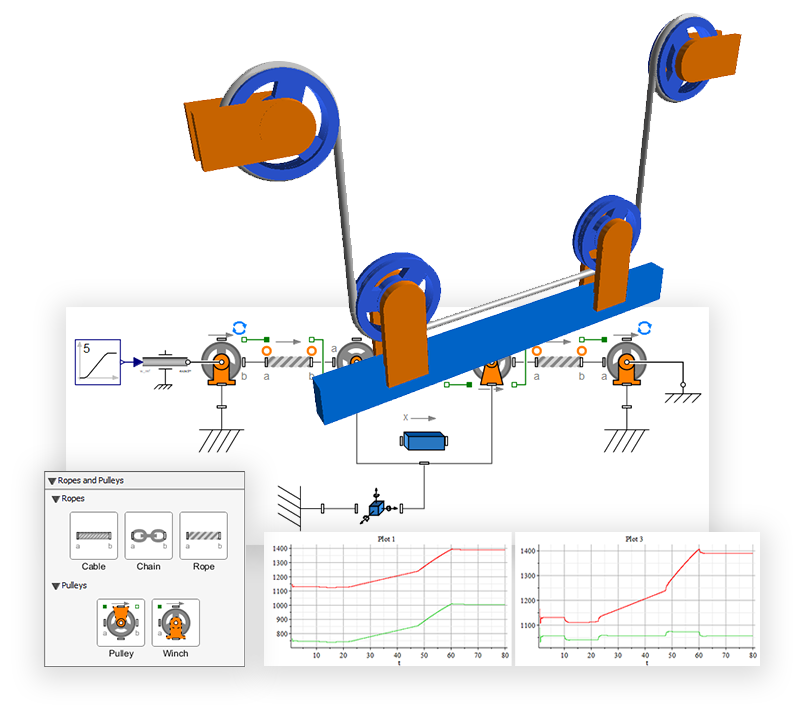
The MapleSim Ropes and Pulleys Library allows you to easily create winch and pulley systems as part of your machine development. Using this add-on library to MapleSim, you can model the dynamics of rope and pulley systems, and view enhanced 3-D visualizations of your system’s performance. Use the Ropes and Pulleys Library to add fidelity to your machine models with ropes, chains, cables, pulleys, and more.